電気機械の学習〜制御〜 [科学と技術一般]
電気機械の学習をしていますが,この試験には制御が含まれます。
電気回路も制御系の一種ですが,電力系では,送配電系にしろ各種電気機器の制御にしろ,制御理論の基本は必要となるようです。制御理論は,回路理論とも共通して電気系はもちろん専門外の理工系の人にも取り組みやすいためか,受験者の選択率は高いようです。そのためか?古典制御の範囲ながらそう易しい問題でもありません(分かりきった問題であっても,時間を切られるとキビシイ)。
それと,古典制御の花形?であるナイキストかラウス=フルビッツの安定判別法を用いてパッと計算しないといけません。具体的手法に関して,ナイキストやボードは覚えていますがラウス=フルビッツは全く覚えていません。後者は係数の並べ方を覚える必要があります。これを覚えていないと解けない問題はまずいと思いますが出たら仕方ありません。19世紀にラウスとフルビッツによって独立に考案された方法は数学的に等価との事なので,覚えやすく使いやすい方だけにします。フルビッツ行列の構成法だけ覚えておきます。
 その練習だけをします。
その練習だけをします。
例題:

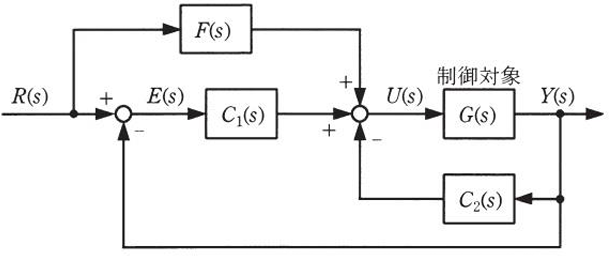
(1)図示の制御対象の伝達関数が\(G(s)=\frac{1}{s^2+4}\)で与えられるときのインパルス応答
伝達関数が与えられているので,これをラプラス逆変換すればOKです。\(\sin\)関数だとわかりますので,元の式を少し変形して,
\[G(s)=\frac{1}{2}\frac{2}{s^2+2^2}\] インパルス応答\(g(t)\)は,
\[g(t)=\mathcal{L}^{-1}\{G(s)\}=\frac{1}{2}\sin{2t}\] (2)さらに\(F(s)=0\),\(C_1(s)=K_1(1+\frac{1}{s})\),\(C_2(s)=K_2s\)のとき,\(R(s)\)から\(E(s)\)までの伝達関数を,\(K_1\)と \(K_2\)を用いて表す
ここでは偏差信号\(E(s)\)の入力(目標値)\(R(s)\)に対する伝達関数とのことで少しひねりですが言われる通りやるだけです。
偏差信号\(E(s)\)は,出力側から直にフィードバックされているので,中身の前向き要素の特性を仮に\(G_0(s)\)として求めると,
\[G_0(s)= \frac{K_1(1+\frac{1}{s})G(s)}{1+K_2sG(s)}\] また,
\[E(s)= R(s)-Y(s)\] \[Y(s)= G_0(s)E(s)\] なので, \[E(s)= R(s)-G_0(s)E(s)\] \[E(s)\{1+G_0(s)\}= R(s)\] \[\frac{E(s)}{R(s)}=\frac{1}{1+G_0(s)}=\frac{1+K_2sG(s)}{1+\{K_1(1+\frac{1}{s})+K_2s\}G(s)}\] 上式に\(G(s)=\frac{1}{s^2+4}\)を代入して整理すると,
\[\frac{E(s)}{R(s)}=\frac{1}{1+G_0(s)}=\frac{s(s^2+K_2s+4)}{s^3+K_2s^2+(K_1+4)s+K_1}\] となります。
(3)さらに,図の制御系が安定限界となるときの\(K_1\)と \(K_2\)が満たすべき関係。又この時制御系が示す応答
ボードやナイキストは直ちには使えないので,ラウス=フルビッツでやるしかありません。覚えてないとアウトです。ここは(当方にとっては)覚えやすいフルビッツ行列でやります。
フルビッツの安定条件は,
\[ \begin{vmatrix} K_2 \\ \end{vmatrix} > 0 \] \[ \begin{vmatrix} K_2 & K_1 \\ 1 & K_1+4 \\ \end{vmatrix} = K_2(K_1+4)-K_1>0\] です。安定限界での定数の条件は,\(K_2(K_1+4)=K_1\)で,制御系の次数から応答は持続振動とみられます。
(4)\(F(s)\neq{0}\)の場合の\(\frac{E(s)}{R(s)}\)
(計算略) \[\frac{E(s)}{R(s)}=\frac{1+C_2(s)G(s)-F(s)G(s)}{1+C_1(s)G(s)+C_2(s)G(s)}\] (5) 上記(4)において,\(F(s)=4\),\(C_1(s)=K_1(1+\frac{1}{s})\) ,\(C_2(s)=K_2s\),\(G(s)=\frac{1}{s^2+4}\)を代入したとき,ランプ状の目標値\(r(t)=t\)に対する定常偏差
上式に与式を代入してひたすら計算しますと,
\[\frac{E(s)}{R(s)}=\frac{s^2(s+K_2)}{s^3+K_2s^2+(K_1+4)s+K_1}\] ランプ入力\(r(t)=t\)のラプラス変換は,\(\frac{1}{s^2}\)なので,これを\(R(s)\)に代入して,偏差信号\(E(s)\)は,
\[E(s)=\frac{s+K_2}{s^3+K_2s^2+(K_1+4)s+K_1}\] これの定常偏差\(e(\infty)\)は,最終値定理を用いて算出できますので,
\[e(\infty)= \lim_{s\to0}sE(s)= \lim_{s\to0}s\frac{s+K_2}{s^3+K_2s^2+(K_1+4)s+K_1}= 0\] 計算するまでもなく,この制御系に残存するゼロモードは無く,定常偏差は0です。
以上,短時間でやるためには,如何に便利なツールを使ってさっさと計算するかにかかっています。
電気回路も制御系の一種ですが,電力系では,送配電系にしろ各種電気機器の制御にしろ,制御理論の基本は必要となるようです。制御理論は,回路理論とも共通して電気系はもちろん専門外の理工系の人にも取り組みやすいためか,受験者の選択率は高いようです。そのためか?古典制御の範囲ながらそう易しい問題でもありません(分かりきった問題であっても,時間を切られるとキビシイ)。
それと,古典制御の花形?であるナイキストかラウス=フルビッツの安定判別法を用いてパッと計算しないといけません。具体的手法に関して,ナイキストやボードは覚えていますがラウス=フルビッツは全く覚えていません。後者は係数の並べ方を覚える必要があります。これを覚えていないと解けない問題はまずいと思いますが出たら仕方ありません。19世紀にラウスとフルビッツによって独立に考案された方法は数学的に等価との事なので,覚えやすく使いやすい方だけにします。フルビッツ行列の構成法だけ覚えておきます。
例題:
(1)図示の制御対象の伝達関数が\(G(s)=\frac{1}{s^2+4}\)で与えられるときのインパルス応答
伝達関数が与えられているので,これをラプラス逆変換すればOKです。\(\sin\)関数だとわかりますので,元の式を少し変形して,
\[G(s)=\frac{1}{2}\frac{2}{s^2+2^2}\] インパルス応答\(g(t)\)は,
\[g(t)=\mathcal{L}^{-1}\{G(s)\}=\frac{1}{2}\sin{2t}\] (2)さらに\(F(s)=0\),\(C_1(s)=K_1(1+\frac{1}{s})\),\(C_2(s)=K_2s\)のとき,\(R(s)\)から\(E(s)\)までの伝達関数を,\(K_1\)と \(K_2\)を用いて表す
ここでは偏差信号\(E(s)\)の入力(目標値)\(R(s)\)に対する伝達関数とのことで少しひねりですが言われる通りやるだけです。
偏差信号\(E(s)\)は,出力側から直にフィードバックされているので,中身の前向き要素の特性を仮に\(G_0(s)\)として求めると,
\[G_0(s)= \frac{K_1(1+\frac{1}{s})G(s)}{1+K_2sG(s)}\] また,
\[E(s)= R(s)-Y(s)\] \[Y(s)= G_0(s)E(s)\] なので, \[E(s)= R(s)-G_0(s)E(s)\] \[E(s)\{1+G_0(s)\}= R(s)\] \[\frac{E(s)}{R(s)}=\frac{1}{1+G_0(s)}=\frac{1+K_2sG(s)}{1+\{K_1(1+\frac{1}{s})+K_2s\}G(s)}\] 上式に\(G(s)=\frac{1}{s^2+4}\)を代入して整理すると,
\[\frac{E(s)}{R(s)}=\frac{1}{1+G_0(s)}=\frac{s(s^2+K_2s+4)}{s^3+K_2s^2+(K_1+4)s+K_1}\] となります。
(3)さらに,図の制御系が安定限界となるときの\(K_1\)と \(K_2\)が満たすべき関係。又この時制御系が示す応答
ボードやナイキストは直ちには使えないので,ラウス=フルビッツでやるしかありません。覚えてないとアウトです。ここは(当方にとっては)覚えやすいフルビッツ行列でやります。
フルビッツの安定条件は,
\[ \begin{vmatrix} K_2 \\ \end{vmatrix} > 0 \] \[ \begin{vmatrix} K_2 & K_1 \\ 1 & K_1+4 \\ \end{vmatrix} = K_2(K_1+4)-K_1>0\] です。安定限界での定数の条件は,\(K_2(K_1+4)=K_1\)で,制御系の次数から応答は持続振動とみられます。
(4)\(F(s)\neq{0}\)の場合の\(\frac{E(s)}{R(s)}\)
(計算略) \[\frac{E(s)}{R(s)}=\frac{1+C_2(s)G(s)-F(s)G(s)}{1+C_1(s)G(s)+C_2(s)G(s)}\] (5) 上記(4)において,\(F(s)=4\),\(C_1(s)=K_1(1+\frac{1}{s})\) ,\(C_2(s)=K_2s\),\(G(s)=\frac{1}{s^2+4}\)を代入したとき,ランプ状の目標値\(r(t)=t\)に対する定常偏差
上式に与式を代入してひたすら計算しますと,
\[\frac{E(s)}{R(s)}=\frac{s^2(s+K_2)}{s^3+K_2s^2+(K_1+4)s+K_1}\] ランプ入力\(r(t)=t\)のラプラス変換は,\(\frac{1}{s^2}\)なので,これを\(R(s)\)に代入して,偏差信号\(E(s)\)は,
\[E(s)=\frac{s+K_2}{s^3+K_2s^2+(K_1+4)s+K_1}\] これの定常偏差\(e(\infty)\)は,最終値定理を用いて算出できますので,
\[e(\infty)= \lim_{s\to0}sE(s)= \lim_{s\to0}s\frac{s+K_2}{s^3+K_2s^2+(K_1+4)s+K_1}= 0\] 計算するまでもなく,この制御系に残存するゼロモードは無く,定常偏差は0です。
以上,短時間でやるためには,如何に便利なツールを使ってさっさと計算するかにかかっています。




コメント 0